A lo largo de este documento se verán distintos bosquejos e ideas que podrán orientarlos hacia el diseño de un brazo. Si bien los bosquejos presentados corresponden a un modelo de brazo bastante complejo, éste puede ser adaptado de acuerdo a las posibilidades de cada uno.
La figura 1 muestra el modelo terminado del brazo que luego se verá con más detalle, en el transcurso del artículo.
Esta imagen corresponde a un modelo comercial denominado ARMDROID, que se utiliza con fines didácticos.
DESCRIPCION TECNICA
En la figura 2 se puede apreciar un diagrama del ARMDROID con todas sus partes detalladas:
Como se puede apreciar este modelo es un brazo muy completo, que posee cuatro ejes de movimiento: Base, Hombro, Codo y Muñeca. Como se ha comentado antes, no es necesario tener todos estos movimientos en un primer diseño. Por ejemplo el movimiento de la muñeca suele complicar bastante el diseño y puede ser obviado perfectamente, sin que esto disminuya demasiado la capacidad de trabajo del brazo.
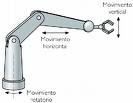
En la figura 3 se pueden apreciar los ángulos de giro clásicos de las distintas articulaciones.
Si bien no se aprecia el ángulo de giro de la base, ésta posee un movimiento de derecha a izquierda y viceversa, con un ángulo de giro generalmente limitado por los cables que conectan el cuerpo del brazo con la base de apoyo. De todas formas, con un buen diseño, es posible alcanzar ángulos de giro muy cercanos a los 360°.
En la construcción de este modelo se utilizan 6 motores paso a paso. Uno es utilizado para el movimiento lateral de la base, un segundo y tercer motor para dar movimiento al brazo y antebrazo, un cuarto y quinto motor para accionar la muñeca hacia arriba y abajo y darle giro, y el sexto y último motor para controlar la apertura y cierre del aprehensor de la mano.
Los motores se ubican principalmente en la base para evitar cargar con pesos adicionales las extremidades, ya que esto redundaría en tener que usar motores más potentes para lograr mover las mismas.
La conexión mecánica entre los motores y los ejes de cada extremidad se realiza por medio de delgados cables de acero, engranajes y poleas, según se aprecia en la figura 4.
Para terminar, veremos dos imágenes que ilustran la construcción y accionamiento de la muñeca y la mano: corresponden a las figuras 5 y 6.
lunes, 16 de febrero de 2009
Suscribirse a:
Entradas (Atom)